The presently accepted theoretical viewpoint avoids recognition of true generalized scalar motion by assuming that motion can only be the result of vectorial movement is the primary source of all theoretical difficulties. The idea that the expansion of space is a vectorial expansion is derived from the movement of matter assumption which then becomes the cause of the ideas expressed in a BIG BANG origin for the physical universe. In the matter movement assumption by which to define motion for a BIG BANG, it is implicit that the universe is now expanding at a somewhat slower rate than at initial expansion of the BIG BANG universe and, thereby, that the physical universe will have some kind of ending. It is also assumed that all points in the presently accepted three dimensional fixed reference system were coincident in a required initial singularity.
From the viewpoint that this universe is a Universe of Motion, the natural progression rate in three dimensional space and in three dimensional time is constant at unit velocity. Unit velocity, s/t = 1, is the reference datum from which all phenomena extend or are generated rather than from the mathematical zero of any specific three dimensional reference system. Rather than having to start with numerous hypothetical massive particles, and/or constructing the larger massive particles from just a few small massive particles, only the concept of motion is required. Deductions concerning dimensionality in a universe of motion provide the extra dimensions often described by other theoreticians as a requirement for generalizing their calculations for matter based constructs; e.g., Hilbert space. These concepts will, no doubt, be just as odd and difficult to become accustomed to as those encountered in any other theoretical development; but new ideas are of that nature. The primary difference here is two fold: one, all phenomena are developed from a single conceptual postulate along with the mathematical postulate that dictates the mathematical procedures by which the consequences of the conceptual postulate are derived and two, the additional dimensions result from recognizing the dimensionality of time.
Many students of the physical sciences have complained that the development of this new theoretical system is devoid of “real” mathematics. Whenever there is as much discrepancy between the concepts upon which a previous theoretical approach has been based and the concepts required for understanding the basis for a new theory as is evident in the present situation, it should not be at all strange that considerable emphasis must be placed on conceptual understanding before the “real” mathematics of the system can be dealt with. Until the new conceptual basis is understood at least as well as that of the previously accepted theoretical systems, any attempt to develop mathematical relations other than the simplest of arithmetical concepts will be met with incredulity and total lack of understanding.
The New Reference: Unit Velocity
For most of our everyday activities here at the surface of our planet we need never be aware of the rotation of the planet beyond time of day; remember that recognition of planetary rotation was less than 500 years ago. The orbital movement of the planet around our star is of concern only as it effects the seasons. The movement of the entire solar system in our galaxy is of no concern to the vast majority of people and even for those astronomers who make measurements of intragalactic motions it is seldom given more than peripheral importance since the results are always given with respect to our planet and solar system. Movement of our solar system relative to other stars in this immediate neighborhood within our galaxy has been of importance only to prove the rotation of galactic systems.
It is recognized that all “things” move, and therefore, for a theoretical system based on motion, there must be some absolute reference for all motions. The postulate and definition of motion as having the two reciprocal aspects, space and time, requires that a unit of space be equivalent and reciprocal to a unit of time. The opposite way of saying the same thing is that a unit of elapsed time, a unit movement in time, is equivalent to a unit movement in space. Unit movement requires all natural locations in space and in time to be moving at unit velocity away from all other natural locations in both the spatial and temporal reference systems. From a purely arithmetical viewpoint, the identity element for multiplication requires the fundamental value of motion to be one, unity. No other initial reference velocity is possible, since infinity and zero have already been ruled out.
Any measurement of any motion, vectorial or scalar, in a spatial reference system must be as speed, or really as a velocity since all measures of space are necessarily vectorial even though we may ignore the direction. Unit speed is not only the measure by which all motions must be interpreted; it is the measure of the natural progression regardless of the reference system in which it is measured. Motion is a continuous progression within the units of motion as well as from unit to unit. A universe in the neutral condition of only unit progression everywhere and everywhen would be one vast domain of perfect uniformity unbroken by anything happening because nothing could happen in neutrality.
All variability of motion must result from combining primary and displaced units of motion. The fact of combining individual units of motion into compound motion structures for manifestation in a temporal or spatial coordinate system must, for a specific number of units of displacement motion, always cause the least possible deviation from unity. Consideration of the combined effect of the modes by which representation in Euclidean dimensionality of the individual units of motion is made provides the means for determining quantitative relations.
The natural direction of motion for the natural reference system of scalar motion is outward with respect to a stationary system. An object that does not have independent motion representable in all three dimensions of either space or time, and/or is not subject to any externally applied force effect, does not remain stationary in a fixed spatial or temporal reference system. It will remain in the same absolute location, its location in the natural reference system, and thereby move outward at unit speed from its initial spatial and/or temporal location, and therefore, away from any object which occupied its initial location in the stationary reference system.
Now that we are acquainted with the idea of having a reference system for motion that originates at and progresses relative to any location representable in our accepted three dimensional reference system, recognition that theoretical phenomena generated by opposition to an outward progression from those natural locations becomes not only easier, but an absolute necessity.
By the same process used in recognizing the observed recession of distant galaxies in space as resulting from the progression of natural locations in the spatial aspect of motion, a similar view of the nature of the progression of temporal location in the time aspect of motion also becomes natural and obvious. To be sure, it is not easy to suddenly start thinking in terms of motion taking place in all directions in space and in all directions in time and from all locations in both space and time simultaneously. As with many acquired skills, continued practice leads to fewer mistakes and better performance.
Real Units of Motion
The postulates require the existence of real units of motion; units that are similar to the units of motion involved in the progression of the natural reference system, except that they actually exist in geometric dimensionality relative to the background of primary scalar motion. These are independent units of motion.
Previous physical theory assumes matter to be superimposed on or placed within the basic space-time background and that matter is not an integral part with the background of space-time. Development of consequences for the postulates for the Reciprocal System of theory requires the background motion to be an integral part of the phenomena of matter and its behavior. For the space time background to be an integral part of all particles of matter, the motion of the background relative to the particles seems to take on a strange almost fictitious character. The fictitious character is caused by our relating of all motions to our conventional stationary reference system. Since the progression of the natural reference system must always be present, the seemingly fictitious nature of a background scalar progression as seen from our biased viewpoint must be converted to reality by the development of the consequences of the postulates for the theory.
To show the reality of a postulated outward natural progression, its presence must first be assumed for development of a few consequences of such an assumption. If the reality of the progression could be shown without making its assumption, it would not have to be assumed and the consequences of the idea would already be well known. As these theoretical consequences are developed, correlations with observations must be made. All of the correlations, when taken together, ultimately show the validity for having assumed the initial presence of a natural outward progression for the concept of motion, and thus, its reality.
Noting that the development of the theory requires an outward progression of a natural reference system and that independent units of motion merely have a reverse sense of direction from that assumed for the background, everything resulting from that development is a motion or an effect of motion. In this manner, independent units of motion are interrelated with the units of the background motion, rather than being separate and distinct from it by having merely being placed within it.
The fact that representation must be made in a three dimensional spatial reference system designates the outward direction relative to individual locations in the spatial system as the direction of natural progression for the spatial aspect of the natural reference system for the theoretical universe of motion as developed by the Reciprocal System of theory. The outward progression of the natural reference system is referred to as primary motion. The discrete unit postulate prevents effective addition of primary motion units to already effective primary motion, so far as any difference of representation possibilities are concerned.
Designation of the outward direction as the direction for positively oriented primary motion of the background makes it impossible for independent outward motion to exist. Therefore, all independent motion must have a net negative magnitude. Since negative is the opposite of positive, negative orientation is inward relative to the outward of primary motion. But, independent continuous linearly inward motion is not possible by itself either. To be continuous, an inward motion must not only be able to exist with an ever present outward progression of primary motion, it must exist simultaneously with primary motion.
The relation between a single unit of time and a single unit of space is always unity. There can be no deviation in this absolute value of the basic speed of scalar motion. This relation must hold true regardless of the number of units of motion in any compound combination of motion units. A displacement from the unit value of primary motion is all that can provide a reference from which independent motion, or any effect thereof, can be represented in any reference system. The velocity of the background primary motion in the spatial aspect is used as the basis from which to determine the net value for the motion exhibited at a reference point.
The first postulate requires that motion exist in discrete units. All units of displacement scalar motion participating in any compound motion, represented in either three dimensional aspect, must be conserved because no mechanism for creating or destroying displaced units of motion is provided by the postulates. This conservation automatically gives rise to a general conservation law expressed through the formulation of specific conservation laws.7
Displacements and Dimensionality
All units of motion have two principal characteristics:
-
continuity within each unit of motion and between contiguous units of motion.
-
progression with respect to the origin of the reference system in which a particular motion is represented.
All units of primary motion progress outward, designated as positive in direction, from all points of reference in randomly selected directions in a generalized three dimensional reference system. Motion randomly oriented with respect to vectorial space results in an inability for a generalized reference system to differentiate between directional orientations of units of independent and primary motion.
In an analysis of any concept, it is necessary to use a system of mathematics for the quantification and dimensionalization of both the procedures and the results of that analysis. The postulates specify that motion exists in three dimensions and that its geometry is to be Euclidean. It would be pointless to start with anything other than a three dimensional rectangular system of coordinates in which to represent any and all units of motion since a minimum of three dimensions is required for general representation of locations in the observable generalized system.
The representation of units of motion in any one specific coordinate system would have maximum probability for a totally random relationship to the orientation of any other coordinate system in which to represent other units of motion because a three dimensional coordinate system can be oriented in so many different ways, an astronomically large if not an infinite number. A totally random orientation of many coordinate systems means that the orientation of individual reference point systems, and thereby, the units of motion represented therein, can have no preferential spatially dimensional orientated relationship other than as specified later in this presentation. Notice that even though individual units of motion may be represented in a dimensional system, the relationship of units of motion represented at any one reference point can have no relationship other than a scalar relationship to those in or at any other reference point outside unit separation in space or in time. Therefore, even though dimensional, a general representation of those motions and their net effects in a generalized three dimensional system is basically a scalar relationship.
It is at this point in the development of the consequences of the postulates for the Reciprocal System of thought that it is absolutely necessary to spell out the nature of some of the limitations imposed in the region in which our normal experiences occur. We observe the movement of material objects to be in one and only one direction at any given instant. In the reality of the dimensional aspect observable by us, ALL available dimensions are required for adequate representation of any ONE direction of any movement in space. We have developed means of mathematically expressing observable relations in accord with our generalized observations of vectorial motion. As a direct result of observational conditions, theoreticians have assumed that vectorial is the only way in which the concept of motion could be rendered.
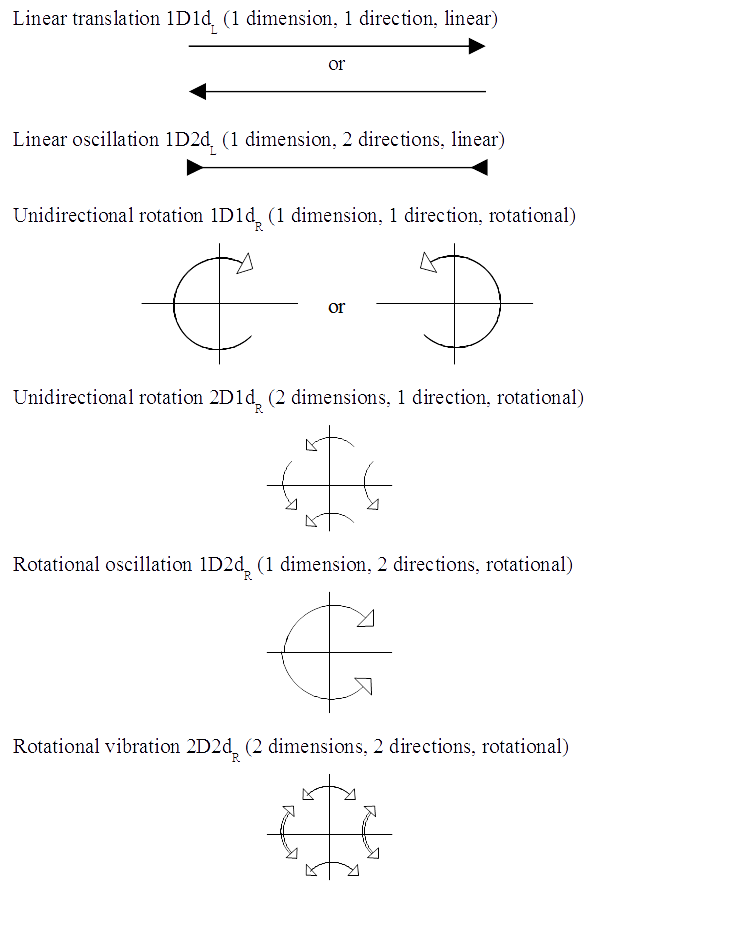
Another point that needs to be clarified concerning the concept of motion is the representation of direction in any three dimensional coordinate system, whether in conventional space or in an individual coordinate system. Even though scalar motion is described as being in either a positive or negative direction, which is usually represented as either outward or inward, the idea of positive or negative can also apply to direction around an axis of rotation. Rotation is often thought of as the result of a continuous change of linear direction of movement of something that is moving linearly, but it need not be that alone. In the concept of motion continuity is the essence of that motion, and therefore, directionality around an axis can be just as continuous as directionality along an axis. Direction, whether represented as linear or rotational, is as much a property for representing motion in a dimensional system as is magnitude.
In any generalized three dimensional system each mode of motion requires a specific number of dimensions and number of directions by which to express that mode in an unambiguous manner. Development of the consequences of postulating the concept of motion as the fundamental idea from which all other concepts and relations are to be developed requires a more fundamental conception for expressing motions than that which subsequently becomes a developmental consequence several steps down the line from that more fundamental conception for expression.
The conception of motions within a specific coordinate system need not be restricted by any of the necessities of representation with respect to other coordinate systems because they become scalar with respect to any other coordinate system. This modification of the concept of representation allows thinking within an individual coordinate system without being at all concerned about the idea of representation with respect to anything other than that specific reference point coordinate system. Motions within a specific coordinate system may be one directional or two directional in one dimension or in two dimensions, all concurrently. There is no a priori requirement for a unit of motion in an individual reference point system to be limited to one direction at any given instant within the normal progression of motion, if that individual reference point system is the only origin that is being considered for dimensional representation of the unit of motion. Remember, it is a concept that is being represented, NOT the movement of a “thing”.
The proposed more logically fundamental manner of representing the concept of motion involves rendering motion in six ways rather than being limited to the conventional four. Since the indicated modes of motion by these diagrams do not also require use of a third dimension, the third dimension of each indicated system is inferred to be normal to the plane of the paper. The One Dimensional one directional rotational representation, 1D1dR, is around any one axis, here diagrammed as being around the axis normal to the paper. The Two Dimensional one directional rotational representation of a unit of motion, 2D1dR, is here represented around the axes in the plane of the paper.
As a consequence of the availability of these six modes of representation in the individual coordinate systems, it becomes necessary to distribute the motions within each individual system in a probabilistic manner that results in a required sequence for compounding the modes. Subsequent randomization of the orientation of each individual coordinate system provides maximum directional distribution or scalarization of an effect in a generalized system of three dimensional coordinates.
For each individual coordinate system this gives six possible directions for the outward linear progression from any specific orientation of a set of coordinate axes with six possible directions for a corresponding inward linear progressional direction. There are also six possible orientations for positively directed rotational representation because of the ambiguity concerning clockwise vs. counter-clockwise appearance. As a further result of this ambiguity, there are six possible orientations for one Dimensional one directional opposition or displacement, 1D1dR, from the corresponding positively directed rotational directions.
Since summation of individual displacements causes the effect of net values of motion representable in a generalized system to be greater than or less than unity, the net effect distributed in a generalized system must be in the dimensionality of either the temporal or the spatial aspect. For material structures the net motion at individual reference points must be less than unity for the effects of such motions to be distributed in the dimensionality of space. Regarding the motions at any individual reference point, it is the requirement to represent motion in three dimensions that is important. Rather than being concerned about whether the individual coordinate system is spatial or temporal, it should be noted that all representations of motion or effects of motion are in the generalized coordinate system identified as space. Inside unit distance the dimensionality is opposite to that outside unit distance. Therefore, the dimensions inside unit spatial distance are essentially in the temporal aspect. The individual dimensionalization of space and time through representation is that which makes it possible to observe any motion or its effect, whether the motion represented is primary motion or temporally or spatially displaced motion.
All of the subsequently developed structural representations for compound motions have components that are coincident with the background motion and even though those components can not be effective from the physical viewpoint they must be present for the compound motion to have stability, and thereby, exist. The effective physical magnitude of such components is zero when it comes to determining the net numerical value of motion for the compound system of displacement motions in a generalized three dimensional system, because at that point in the analysis one is determining the effective magnitude of displacement from unity.
Scalar motion has no intrinsic direction in any generalization of either a spatial or temporal reference system; scalar motion has only magnitude. It is the representation of a magnitude of motion in a specific individual dimensional system that gives a magnitude of motion a direction. The order in which the modes of dimensional motion are compounded follows the order dictated by probability distributions of magnitudes resulting from the dimensionality and directionality required for representation of the six kinds of dimensional motion possible. Since we observe four modes of motion in the conventional generalized reference system, those four modes are the effective result of the limitations on representation of motion in either dimensional aspect. The “how” of this result will be discussed in a later mathematical presentation. Qualitatively, the concept is grasped intuitively after “playing” with the six modes and the descriptions for atomic and sub-atomic structures.
Vectorial motion is motion with an inherent vectorial direction; that is, a movement in a specific direction that can be fully represented in a generalized stationary coordinate system. Scalar motion is either negatively or positively oriented as viewed from the origin of any specific individual three dimensional system and with respect to one of its aspects, space or time. Scalar motion is given a vectorial direction by the factors involved in its relation to an individual reference system and is represented by negative or positive scalar magnitudes only; values between -1 and +1. The imputed vectorial direction of a scalar motion is independent of its direction in the individual coordinate system except to the extent that the same factors affect both.
Transmission or Progression
Primary motion is always represented in the first possible mode of representation with respect to a specific reference point coordinate system. A displaced unit of motion maintains the dimensional and directional representation originally represented in an individual reference system so long as it remains with the original unit of primary motion. Upon transference to another unit of primary motion the displaced unit of motion may change generalized directionality or mode of representation; that question is resolved by equivalency relations. The dimensional relationship between units of displacement represented as two directional linear in one Dimension and the direction represented by the linear primary progression is represented as a perpendicular relation because the displacement has offset the representation of primary progression in one of three possible perpendicular dimensions.
The spatial orientation of the dimension of displacement and the direction of progression in the stationary reference system are determined completely by chance, or by the characteristics of the originating object and its required orientation in the generalized spatial or temporal system. The characteristics of the originating object and its environment also determine the space-time relationship for the number of oscillations to be represented as the two directional motion, thereby determining the apparent rate of oscillation per unit of primary motion. The number of units of displaced motion in each of the represented dimensions remains fixed relative to primary motion until subsequent appropriate interaction with some other complex motion structure.
There is no inherent relationship between numbers in perpendicular spatial dimensions as observed, and thereby, this observation declares this to be an inherent characteristic of the mathematical system. Therefore, there is no inherent relationship between the number of displacement units in a coordinate system dimension and the direct representation of primary motion in another dimension of that same coordinate system. The only requirement concerning representation, other than continuity of numerical and dimensional relationship, is that transfer to a different unit of primary motion constitutes the start of a new location in the natural reference system. As long as a compound motion remains in a specific unit of primary motion it maintains continuity of direction relative to both three dimensional aspects of the individual coordinate system and, thereby, the generalized system of coordinates. Compound motion structures remain in straight line motion until transferred to primary motion having a different direction of apparent translation in the generalized reference system of space.
The generalized effect of oscillation is defined for a generalized three dimensional coordinate system as being in one dimension, or around an axial dimension, in one direction followed sequentially by the opposite direction of that dimension, or the opposite direction around that same orientation of axial dimension. By sequentially opposed directional representation, both directions of a two directional reference point motion are given equal probability for representation of effect. Both directions, of representation are required for completion of the probability relations between the scalar motion, its mode of representation, and the effect of the representation. As a direct result of this probability relation 1D2dL displacement can be represented only by a linear oscillation effect in the generality of three dimensional space.
If the compound motion has displacement represented in all reference point dimensions, it cannot remain in the same unit of primary motion, and therefore, is not remaining in the same location in the natural reference system or precisely the same location in the generalized system of space or time. This is the case for compound motions appearing to be stationary in three dimensional space. Collisions and other associations among displacement structures will be discussed in later chapters after more of the basics have been explored.
Compound motion structures in the theoretical universe of motion represented as being composed of one Dimensional two directional motion progressing linearly in a perpendicular dimension have characteristics and behavior which correspond to those of photons of “electromagnetic” radiation observed in the physical universe. Other compound motion structures correspond to various sub-atomic particles and atoms of matter. Therefore, whenever such entities are being referred to in the theoretical universe, they will be referred to by the names given to experimentally observed objects according to their properties—photons, electrons, protons, neutrons, neutrinos, atoms, etc. Reference to the processes by which the various particles and effects are emitted or otherwise released for observation by subsequent interactions in which they engage are referred to by the names given to the corresponding physically described processes.
The problem of how radiation is transmitted through space has been easily solved—radiation is not transmitted at all. “The photon remains permanently in the same space-time location in which it originates, but space-time itself progresses, carrying the photon with it, and the photon is therefore able to interact with any objects which are not carried along by the progression and which are therefore encountered enroute.”8 The other behavioral characteristics of photons with atoms of matter are just as easily solved since all structures are basically the same: scalar motion compounded in its representations due to the individual dimensionality of its reciprocal aspects. Mathematical description of the interactional characteristics of all scalar motion structures requires only a description of the representational modes for all displacement motions involved in each of the compound motion structures in terms of their scalar values, dimensional and directional characteristics and/or effects. This may seem like an over-simplification, but the greatest hurdle is that of conceptual understanding and subsequent description verbally of the various structures and interactional processes.
The principal conceptual hurdle is that of “thinking from” the natural reference system. Displaced objects are progressing inward toward the natural location of objects such as photons and sub-atomic particles which are not displaced in all spatial dimensions. From the point of view of the natural reference system, photons are not moving or going anywhere, they remain in the same unit of primary motion in which they were produced. Because of our dimensional bias, we observe compound motion structures composed of multi-dimensionally distributed displacements as being stationary and one dimensionally displaced structures as progressing outward away from the multidimensionally displaced objects.
Displacements
The measure of motion is speed and the units of motion are always one unit of space, either inward (-) or outward (+), for each unit of time, either outward (+) or inward (-); not respectively and deliberately reversed for emphasis so as to not imply an always relation. From the standpoint of the natural scalar reference system the absolute measure or value of each unit of motion is the same whether negatively or positively oriented in space or in time.
Because of the status of unity as the natural reference datum, a deviation of m-1 units of motion to a speed of 1/m has the same natural magnitude as a deviation of m-1 units of motion to a speed of m/1, even though, when measured from zero speed in the conventional manner, the changes seem very disproportionate. In order to reflect the fact that these deviations are actually equal in magnitude from the natural standpoint, it is necessary to set up a new system of speed measurement in which the magnitude of the speed is expressed in terms of the scalar direction of deviation from unit speed to speeds greater than unity or to speeds less than unity. Obviously, such speeds are not commensurable with speeds measured in the conventional manner, and must therefore, be referred to as “speed displacements” or simply as “displacements” if NO ambiguity is generated by such simplification.
The difference in effective value of motion occurs when the magnitude of all displacements is related to individual dimensional representations since the net effect of the resulting compound motion is localized at each reference point in dimensional space or time. Displacement from the natural progression, unity, as it appears in a spatial or temporal reference system, is that which makes the displaced compound motion have an effect or interactional appearance in the dimensional aspects of either space or time.
A positive displacement or a negative displacement always involves the addition of some number of units of motion in which the effect in one of the aspects is changed to negative while the other aspect continues unidirectionally positive. This means that the apparent magnitude of one aspect can stay at the unit level in the compound motion while the magnitude of displacement in the other is effectively changed to a larger value.
In a universe of motion there is no such thing as physical space or physical time independent of motion, but we can abstract the space or time aspect of the motion and imagine it independently and think in terms of manipulating it independently. When adding motions together we are not adding independent quantities of time or space to obtain the new value of displacement motion. The added displacement motion is placed in concurrency with an original amount of displacement motion to obtain a new value of displacement motion to be represented in the three dimensional aspect. Added motions may be represented in the same dimension or in a dimension perpendicular to the previous motion. Each added displacement may be either positively or negatively displaced from unity, either linearly or rotationally directed. Probabilities for stability of effects for different combinational representations determine a specific sequence for compounding displacement motions to obtain different magnitudes of effect. The dimensionality and directionality or mode of representation of each unit of displacement motion added has a very specific effect on the total magnitude of effective displacement. The precise sequence of net effects is incremented as the sequence of minimum values resulting from the previously determined probabilities of representation.
Representable Motions
The motion units involved in all compound motion structures developed in the Reciprocal System of theory are represented as linearly or rotationally directed in one of the following ways: both the space and the time aspect oriented in the same scalar direction; i.e., both (+) or both (-). Both combinations yield the same effect and are indistinguishable in a generalized three dimensional coordinate system; both aspects positively oriented is primary motion; both aspects negatively oriented is equivalent primary motion.
With the space and time aspects oriented in opposite directions the unit of motion is referred to as a displacement, as previously described; i.e., having (+) space with (-) time or (-) space with (+) time orientation. The displacement unit having (+) space with
(-) time orientation is referred to as a negative displacement unit. Similarly, a displacement unit having negatively oriented space and positively oriented time is referred to as a positive displacement unit. More consequences fall into line with current terminology by this assignment than by the opposite assignment.
Directionality of positive and negative displacement units of motion is represented as either linear or rotational, thereby, making diagrams difficult, if not impossible. Oppositely directed pairs of displacement motions of the same mode of representation cannot be directly added together in the same reference point dimension, because each offsets the other. Positive and negative displacements can be used in other combinations, so long as they do not have the same descriptors in the same reference point dimension of a given individual coordinate system. Positive displacement can be added in a dimension in which a positive displacement of the same mode is being represented, even though negative displacement may not. As with positive displacements, negative displacement of the same mode of representation can be added in a dimension in which negative displacement is already represented.
Mode, direction, and dimensionality of displacement combinations modify the net effect of the total effective displacement. Any displacement not exactly negating another previously present unit of displacement may be added to the compound motion structure for the purpose of modifying effects. Each superimposed or compound motion has its own degree of stability ranging from very weak or loose to very strong or tight, but none which cannot be separated under appropriate conditions.
Don’t be overly concerned if the previous paragraphs of this section are not completely understood on first reading; after all, the concepts were not fully developed upon first conception of them. After the structural representations for various atomic and sub-atomic structures are discussed, these statements will become somewhat more understandable.
Any displacement added as a positive displacement to a compound motion causes the value of the combination motion to be less than its previous value. Displacing the time value in the representation of the net compound motion toward a larger value effectively increases the amount of time in association with the representable quantity of space; thereby, reducing the effective value of net motion in the spatial aspect.
Because the value of the represented motion is less than unity, it is not progressing with the natural reference system at the normal rate of primary motion in the spatial aspect. This is what makes net positively displaced motions representable in dimensional space. The representable motion having been displaced from the natural rate of progression of the spatial aspect, the compound motion becomes something in dimensional space that has less than unit rate of progression or is actually moving inward in all directions in the spatial aspect of motion. Thereby, values of motion less than one are represented in dimensional space, and thus, can be perceived as having reality. Examples will be forthcoming in the next chapter.
Similarly, a negative displacement increases the speed by adding units of motion in which the space units are unidirectionally positive and the time direction is negative. Values of net motion greater than unity are representable only in dimensional time and thus to us they have no reality. But to that sector of the universe they appear in the same manner as things in our sector appear to us. From the viewpoint of that sector those values of motion are less than unity. In the reciprocal or cosmic sector, the time of the material sector has the conceptual position of the three dimensional aspect we call space. Also, as it would be considered in the reciprocal sector, the space of this material sector has the conceptual position of our scalar progressive time. Admittedly different, but never-the-less this is a necessary condition in the development of the consequences for the postulates.
Additional units of motion unidirectionally positive, both aspects coincident with the natural progression of primary motion, are NOT effective from the physically representable standpoint. Because adding precisely identical representations, (+1) / (+1), cannot change the representable value of primary motion, they can be considered as not having been added. Each unit of displacement is in opposition to a unit of appropriately oriented primary motion of the required sequential mode. By opposing that mode of primary orientation, an effect is generated. A change of total effective displacement motion due to added displacement motions causes a different effect to be manifested by the difference of representations in the newly compounded motion. The difference for the added motion may be caused by the dimension of representation, or the mode of representation, and/or the magnitude of the representation.
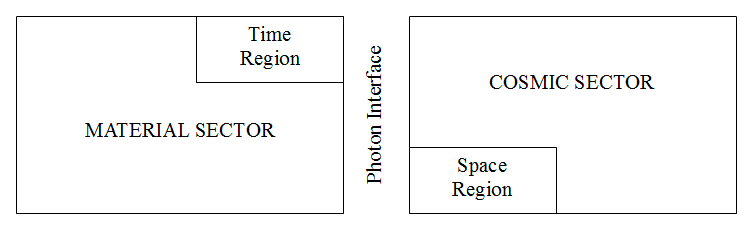
Reiterating a point concerning photons of radiation and their representation in dimensional space. The displacement motion has no direct representation dimensionally in either generalized space or generalized time. Only the effect of the one Dimensional two directional linearly represented motion, 1D2dL, at the individual photon energy reference point is representable in either generalized three dimensional system of coordinates. All photons of all frequencies exist in an interface between the material and cosmic sectors and are only observable due to interactions in whichever sector the interaction takes place. It is the interaction with the compound motion of another Notational Reference Point system that identifies the effect of the photon as a photon. The total quantity of motion encapsulated, as it were, with the primary unit of motion represented as progressing relative to a spatial coordinate system is what determines the energy transferred through interactions in dimensional space, and thus the energy content of that photon unit. Each frequency representation, being encapsulated in a unit of primary motion, is represented by us as being either within a unit of space or within a unit of time, whichever is most convenient, because less than one unit of each aspect cannot be represented; motion is unitary.
The Photon Interface is not any specific place, it is everywhere and everywhen material matter and cosmic matter are not. The Time Region is inside atoms of Material Matter and the Space Region is inside atoms of Cosmic Matter. The Material Sector is the region which we identify as our physical universe while the Cosmic Sector is a region just like our half but with the concepts of space and time inverted.
Any attempt on our part to represent scalar quantities in either generalized dimensional aspect is only, and can forever be, only a graphical or mathematical tool or device for understanding; the representation is only a model and must be considered as such.
A model depicts a limited number of identified characteristics for the phenomena being modeled. A model is not a picture of reality because a picture is a true and accurate representation within the limitations of the picturing medium of that which is being pictured. Consider a hologram or a photograph as an example of a picturing medium; the observed objects of this three dimensional world are represented by various sizes and positioning of patterns or images in two dimensions. In this sense, physical reality is merely a picture in three dimensions, in the spatial aspect or the temporal aspect, of the true scalar reality of the universe of motion. Mathematical representations of motions may be with respect to three Cartesian coordinates or with respect to a plane and a perpendicular axis as spherical coordinates. In either case, the mathematical representation is only a model used to depict magnitude and directionality for the motions from which an effect is derived. Verbal and mathematical models are NOT the true reality.