Background
Researcher Miles Mathis wrote a couple of interesting papers concerning the mathematical constant, π, “What is Pi?”1 and “The Extinction of Pi,”2 where he causes considerable controversy with his conclusions that π is an acceleration and has a value of 4.0, not the conventional 3.14159265. This raises an interesting point in the Reciprocal System because the RS is based on discrete units of scalar motion, analogous to quanta in conventional science. As you shrink a circle in diameter, eventually you will reach the point where the discrete boundary is reached and you end up with a square, instead of a circle. A “unit square” has a diameter of one unit and a perimeter (circumference) of four units, making the value of π to be 4.0, just as Mathis indicated in his papers.
Upon further investigation into the value of π, it was found that the answer in the Reciprocal System is “all of the above,” with the caveat that the value of π is reference system dependent.
As mentioned in the paper on scalar motion,3 the “units of motion” are counting numbers with a minimum quantity of one. Consecutive units therefore appear as links in a chain—solid bits of metal that can only flex at their boundaries. Larson, during his discussion on direction reversals, states that the only time you can change scalar direction is at the unit boundary, where the “links of the chain” can bend. This is radically different from the continuum approach of conventional science, where there are no discrete units and the structure is more like a piece of rope, able to bend at any location.4
Pixelation: Squaring the Circle
In our conventional, Euclidean frame of reference, there are three, orthogonal axes that we divide by fixed distance intervals. In the case of the Reciprocal System, those intervals are fixed at one natural unit of of space (or time, if cosmic). To use an old computer graphics term, our Euclidean reality is pixelated in a fashion similar to what computers draw on a monitor—a bunch of little boxes, not a smooth structure. Pixels have gotten really small these days, but if you take a magnifying glass to your monitor, you will see that it is composed of a bunch of dots of color and that a diagonal line actually looks like a staircase—it is not smooth. The same happens with curves—they are approximated, because the monitor is made of tiny, illuminated squares.5
Pixels are treated as a unit, in the sense that a blue pixel will be all blue; you cannot start with red on one side and end up with blue on the other side, in the same pixel. The entire pixel will always be the same color and intensity across its surface area. This is analogous to Larson’s “discrete unit” postulate. You can only “change color” after you exit one pixel and start another. Angled lines and curves drawn with pixels therefore appear jagged.
![]() The rectangles are what the computer actually displays, in pixels, to make the black line that is seen on the monitor. It is optical trickery.
The rectangles are what the computer actually displays, in pixels, to make the black line that is seen on the monitor. It is optical trickery.
Consider the same situation in Nature. The observable, measurable universe is also “pixelated” because of the Reciprocal System’s discrete unit postulate and the absolute scaled, orthogonal, Euclidean projection. It is a grid of cubes—we just call it quantized rather than pixelated.
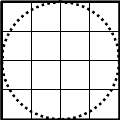
 Now consider what happens if you try to draw a circle on a computer monitor that has a radius of one pixel? You get a 2×2 square, with a circumference of 8 units,6 a diameter of 2 units, and π, the ratio of circumference to diameter, is actually 8/2 = 4 — not 3.14159, due to pixelation.
Now consider what happens if you try to draw a circle on a computer monitor that has a radius of one pixel? You get a 2×2 square, with a circumference of 8 units,6 a diameter of 2 units, and π, the ratio of circumference to diameter, is actually 8/2 = 4 — not 3.14159, due to pixelation.
Programmers that dealt with the early computer graphics worked at pixel level and knew that the perimeter of a pixelated circle is 4× its diameter. This had to be accounted for when a user tried to pick a location on a circle, because it was approximated. With a light pen, you could select the pixel approximating the circle—near where the mathematical circle should be, but seldom exactly on it.
-
Discrete Structure
Radius
Perimeter
Circle/Square
π (P/2r)
π (A/r2)

1
8
4/4
4.00
4.00
2
16
16/16
4.00
4.00
3
24
36/36
4.00
4.00
4
32
60/64
4.00
3.75
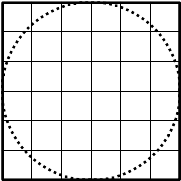
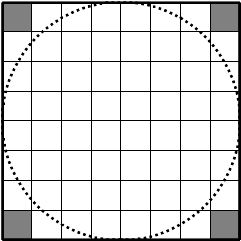
Take that unit square representing a pixelated circle and increase the radius to 2 or 3. You get a series of squares, since the curvature of the “real” circle is still too steep to clip any of the corners. As the diameter increases, “clipping” occurs as indicated by the gray squares in Radius=4, resulting in a decreasing ratio of circular to square area that approaches the accepted value for π, as the radius approaches infinity. The clipped pixels are those that are entirely outside the circular area. But note that the radial-to-square area changes with radius, the perimeter does not, even if when following the jagged path around the clipped boxes. The perimeter is always 8r, or 2πr, where π=4.
-
Radius (pixels)
Square Area (pixels)
Circular Area (pixels)
π
1
4
4
4.00000000
2
16
16
4.00000000
3
36
36
4.00000000
4
64
60
3.75000000
5
100
96
3.84000000
6
144
132
3.66666667
7
196
172
3.51020408
8
256
224
3.50000000
9
324
284
3.50617284
10
400
352
3.52000000
100
40000
31812
3.18120000
200
160000
126424
3.16060000
300
360000
283892
3.15435556
400
640000
504220
3.15137500
500
1000000
787344
3.14937600
600
1440000
1133308
3.14807778
700
1960000
1542092
3.14712653
800
2560000
2013768
3.14651250
900
3240000
2548164
3.14588148
1000
4000000
3145544
3.14554400
Table 1: Quantized Area to Radius
It is this knowledge of pixelated (discrete) circles that provides a Reciprocal System understanding of Mathis’ “π = 4” concept. By assuming that the smallest quantity is a single, discrete unit (limit=1), rather than the smallest quantity approaching nothing (limit→0), you are quantizing the system into square, pixelated components where there is no such thing as a curve—only an approximation of a curve, made with stair-stepped lines of a fixed, unit-sized width. That stair-stepping adds the extra distance to the perimeter to bring π up to 4.0.
So there are actually three different concepts for this ratio we refer to as π:
-
Analog: circumference / diameter = 3.14159… in all cases (yin aspect). This is the mathematical value, that only exists in mathematics—not in Nature.
-
Quantized: perimeter / diameter = 4.000 in all cases (yang aspect). Due to the discrete unit (smallest quantity of one), this is the value found in the 3-dimensional, spatial coordinate system of Nature.
-
Transitional: area / radius2 = 4.000→3.14159… as radius→∞. This is a range of values, dependent upon radius—but note that in Nature all quantities are finite—there are no infinities, hence, the mathematical value for π can never be reached, since the radius (or area) will always be limited.
Acceleration and Orbital Velocity
In a universe of motion, everything is based on the ratio of motion, being speed (s/t) or energy (t/s). There are no unitless constants, such as π. So what are the units of π?
We normally represent the calculation of speed as distance per unit of time, v = s/t, where “s” is a spatial distance. This can also be expressed as an acceleration for a quantity of time, v = at, or in natural units of space and time, s/t = s/t2 t.
But going around the circumference of a circle is not the same thing as moving in a straight line, which is what these equations represent. Circular motion is referred to as an orbital velocity, v2. If we treat our equation for circumference, C = 2πr as the equation for orbital speed, expressed in natural units of space and time, we get:
$C = 2 \pi r ~ or ~ \frac{s^2}{t^2} = \frac{s}{t^2}s$
Where the circumference is an orbital velocity, the radius is a spatial distance and the value of 2π has units of acceleration.
We can therefore define acceleration in two, different ways:
-
Linear velocity over time: $a = \frac{v}{t} ~ or ~ \frac{s}{t^2} = \frac{s}{t} \frac{1}{t}$
-
Orbital velocity over space: $a = \frac{v^2}{s} ~ or ~ \frac{s}{t^2}=\frac{s^2}{t^2} \frac{1}{s}$
Like its yin-yang counterpart, all motion in the Reciprocal System is a relation of rotation (yin, orbital velocity) to translation (yang, linear velocity). In the material sector, rotation is in time and translation is in space. Both of these equations are natural consequences of the unit of motion concept.
Consider that with π=4, the equations become simpler and we find that Larson is already using them, though never realized that he was dealing simply with a pixelated perimeter and area. For example, the circumference is 2π r, or simply 8r. Circumference is an orbital velocity and the radius is linear (a line), so this is defining the relationship between rotation and translation, which is found in all of Larson’s 8:1 ratios concerning the electron.
Further, if we look at the area, A = π r2 or A = 4r2, we find that this is exactly the same formula that Larson uses to compute the Periodic Table of the Elements, 4n2. At a conceptual level, the definition of π=4 is stating that, in a discrete unit system (quantized), the electric rotation is analogous to the circumference (perimeter) and the magnetic rotation is analogous to the area. This also explains Larson’s choice of a 1-dimensional rotation for electric motion and a 2-dimensional (planar) rotation for magnetic motion.
This quantum π relationship will be further expounded upon in following papers, demonstrating that they are the underlying structure to electron orbitals and the atomic structure, as organized by the Periodic Table.
The Reciprocal System, being based solely on natural consequences (those found in Nature), tends to use the quantum π value of 4 in many applications. So pick your “piece of π” by the reference system in use.
1 Mathis, Miles, “What is Pi?”, http://milesmathis.com/pi.html
2 Mathis, Miles, “The Extinction of Pi”, http://milesmathis.com/pi2.html
3 Peret, Bruce, “RS2-104: Scalar Motion”
4 String Theory is between conventional and Reciprocal System approaches, using a continuous “rope” that wiggles to form standing waves, the discrete units of the RS. The string waves end up being 1/n, wher “n” is a counting number.
5 LED monitors tend towards squares, whereas the older CRT monitors were dots. This was a big problem in the early days of computer graphics, as designers were accustomed to the smooth lines of a drafting board and raised a big fuss over the jagged lines of the lower-resolution displays back in the 1980s. Manufacturers eventually resorted to anti-aliasing techniques to blur the “jaggies” to make it visually appear smooth.
6 Assuming a 1:1, height:width ratio.